The Bouffalo BL602 family of parts is a very popular low-end RISC-V part. It has WiFi, Bluetooth, and a handful of GPIO ports. The 192Mhz CPU speed with 276K of RAM and 128K of RAM is low cost (<$2 in bulk), which makes it popular for individuals with homemade prototypes or commercial use. Development boards like Pine64’s Pinecone and Pinenut series are easy ways to get FCC-certified radios in handy breadboard-ready DIP packages.
But…
There’s always a “but,” isn’t there?
The development process can be frustrating. There are several code uploaders that simply don’t work as expected, particularly on a MacOS environment. For this article, we’ll even fast-forward over that unpleasant fishing lesson and just give you a fish. Even Bouffalo’s own BLDevCube, if available for your OS, doesn’t get high marks. I’ve spent hours working with Bouffalo engineering and still don’t have it working.
Use https://github.com/spacemeowx2/blflash. Rust apparently doesn’t know how to set the bit rate above 230 kbps (where POSIX ends) on macOS, so you have to upload more slowly than our Linux peers. The command to use is “cargo run flash /tmp/sdk_app_st7789.bin --baud-rate 230400 --initial-baud-rate 230400 --port /dev/tty.usbserial-1440.” Poof. You now have an upload command that works, is scriptable, and is easy to recall from the command line history.
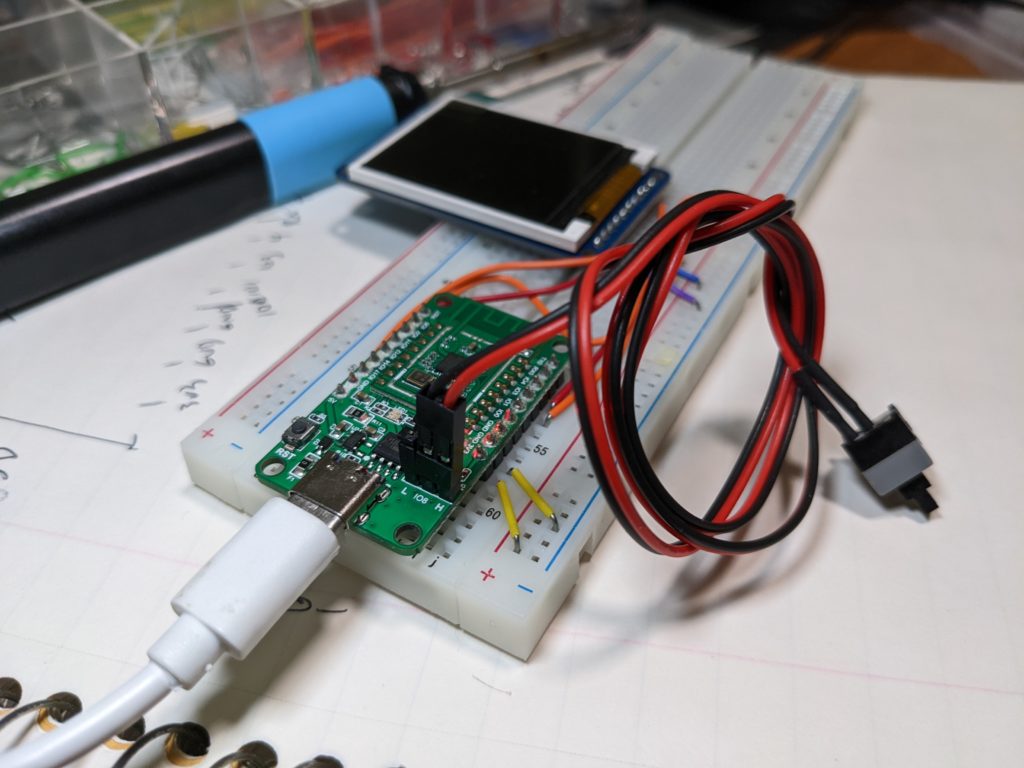
The thing that’s harder to script is the amount of physical fiddling that’s required. You have to move a jumper on IO8 from L to H, press the reset to start the board’s native code downloader, then move the jumper back and press the reset again. It’s very easy to miss one of those steps while debugging a binary, so you end up looking at the source for version N, but running version N-1 on the device. As you can guess, it’s frustrating.
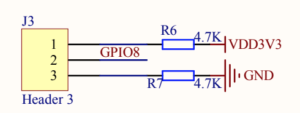
I’ve long had it in my mind that the jumper was a pin on the address bus and the CPU needed to be connected to one block to program it and another to run it. (That sounds wrong now that I’m typing that, but I have had hardware in my past that required this.) The schematic for the Pine64 board is dead simple, as all the ‘magic’ is in the canned castellated board.
There is no magic to this pin. This pin is connected to GPIO8 on the BL602. The state of GPIO8 is polled exactly once in the bootup sequence. Though there are pullups via the jump to high or low, the pin floats in the ‘low’ state, which allows the device to boot to the flashed code by default. So if you just remove the jumper, the board runs the last code you squirted into it. That seems a nice default. How can we use this to our advantage?
What if we scavenged a momentary contact switch for this? PC power supplies haven’t had “real” power buttons in decades. There’s a momentary pushbutton that sends a request to the power supply to kindly turn off or on, based on the momentary push of a button that just usually happens to feel clicky. They usually just happen to have a header that’s on .100 posts, so they’ll just slide right on.
With this “hack” in place (“Number 143 will blow your mind!”), resetting the board can become a fluid motion that you can commit to muscle memory:
- Press and hold your newly attached button.
- Press the reset button.
- Release the reset button.
- Release your new ‘boot button.’
- Start your code download.
- Press the reset button to begin running your code
It’s probably possible to release the button too fast as several opcodes have to be executed to configure the processor and ultimately poll that button, but it’s my experience that as long as you treat it Press A-B Release B-A, it’ll come up executing the downloader every time.
Also, to summarize the key parts of the BL engineering spec for the bootloader, it’s helpful to recognize the boot flow.
- Reset Vector -> chip setup -> check GPIO 8. Is it low? Jump to user code. Else, start bootloader.
- The bootloader will start spraying ‘.’ (period) character while it’s listening to the serial port. These are at 2,000,000 bps by default. This is unfortunate because it’s a high enough rate that many programs can’t listen at this spec. I’ve not counted them or put them on a scope, but I’d say there are 8-10 of these a second.
- Inside this same loop, it’s also listening to the serial port. If it receives a ‘U’ (0x55 – chosen to maximize bit toggles so it can sample widths) it will try to reset the serial bit rate to match that speed and the ‘.’ pattern will continue at the new rate. Depending on exactly when that ‘U’ is received, it may take a couple of these to sync up at another bit rate.
- Now that the initial bit rate has been agreed upon, a program like blflash can do “protocol stuff” (documented elsewhere) to send the download to the BL device.
If you’re running a program like CoolTerm to actually talk to the device, it’s useful to set it at the matching bitrate. You’ll know you’ve missed a step if you see the streaming period characters because that means the device is listening to you typing, awaiting “protocol stuff” packets, instead of the upload program, like blflash. Starting and stopping (‘connecting’ and ‘disconnecting’ in CoolTerm) the application you may be viewing the serial port is another step to synchronize with this. It’s for this reason you should try to quickly get your app to a state where it can communicate via a screen or blinking lights just so you don’t have another step. That’s just an unfortunate reality of hardware makers giving us one port to use as both a code uploader and a console.
Enjoy you jumper-free life!
P.S., just attach the loose jumper with one pin dangling free so you’re less likely to lose it.